Endlich hatte ich wieder mal etwas Zeit, um an meinem XJ470 weiter zu basteln. Als erstes habe ich die zwei Standfüsse an dem Rahmen befestigt und danach den forward Gimbal Mount zusammengebaut und auch auf den Rahmen montiert.

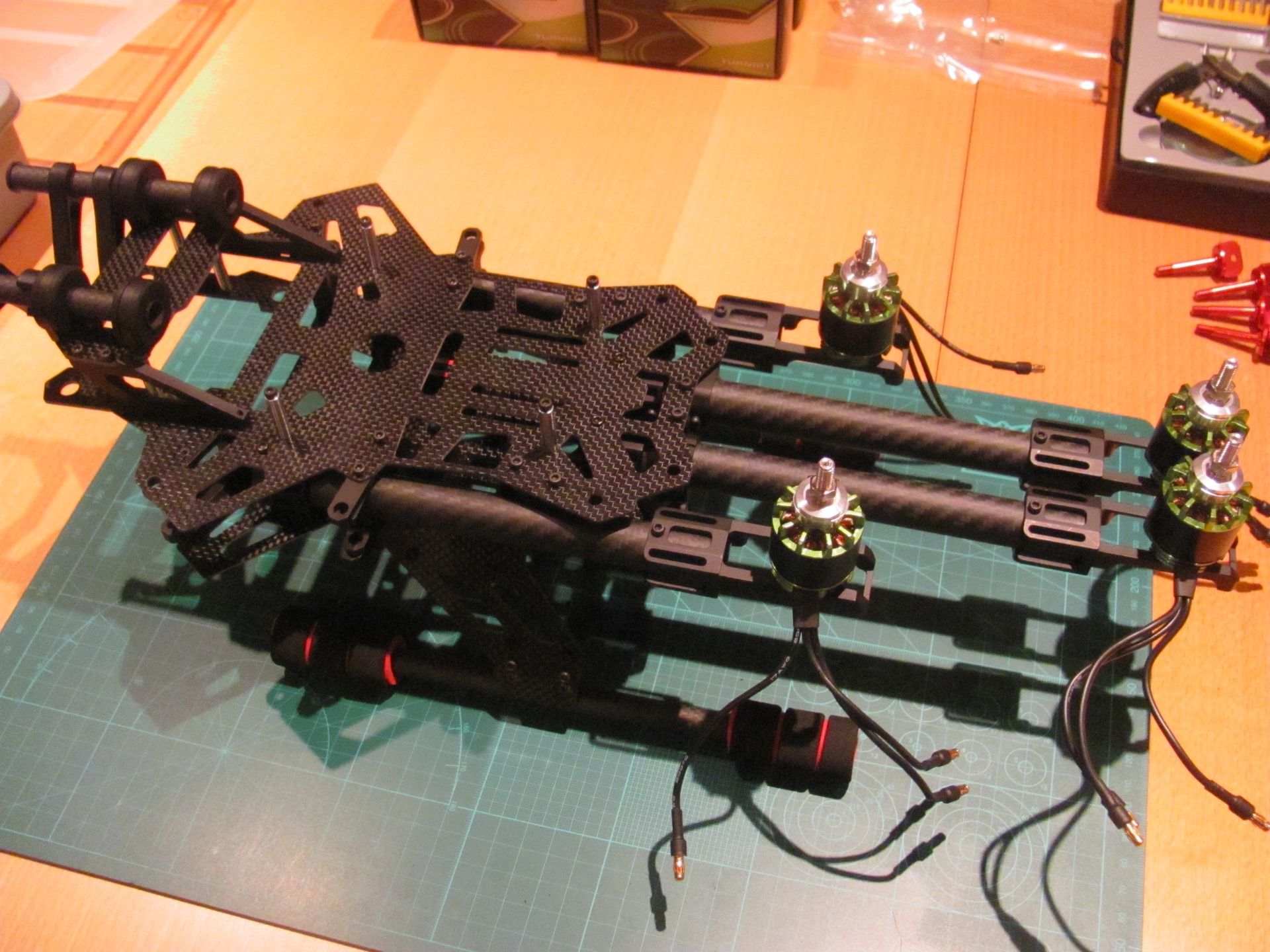
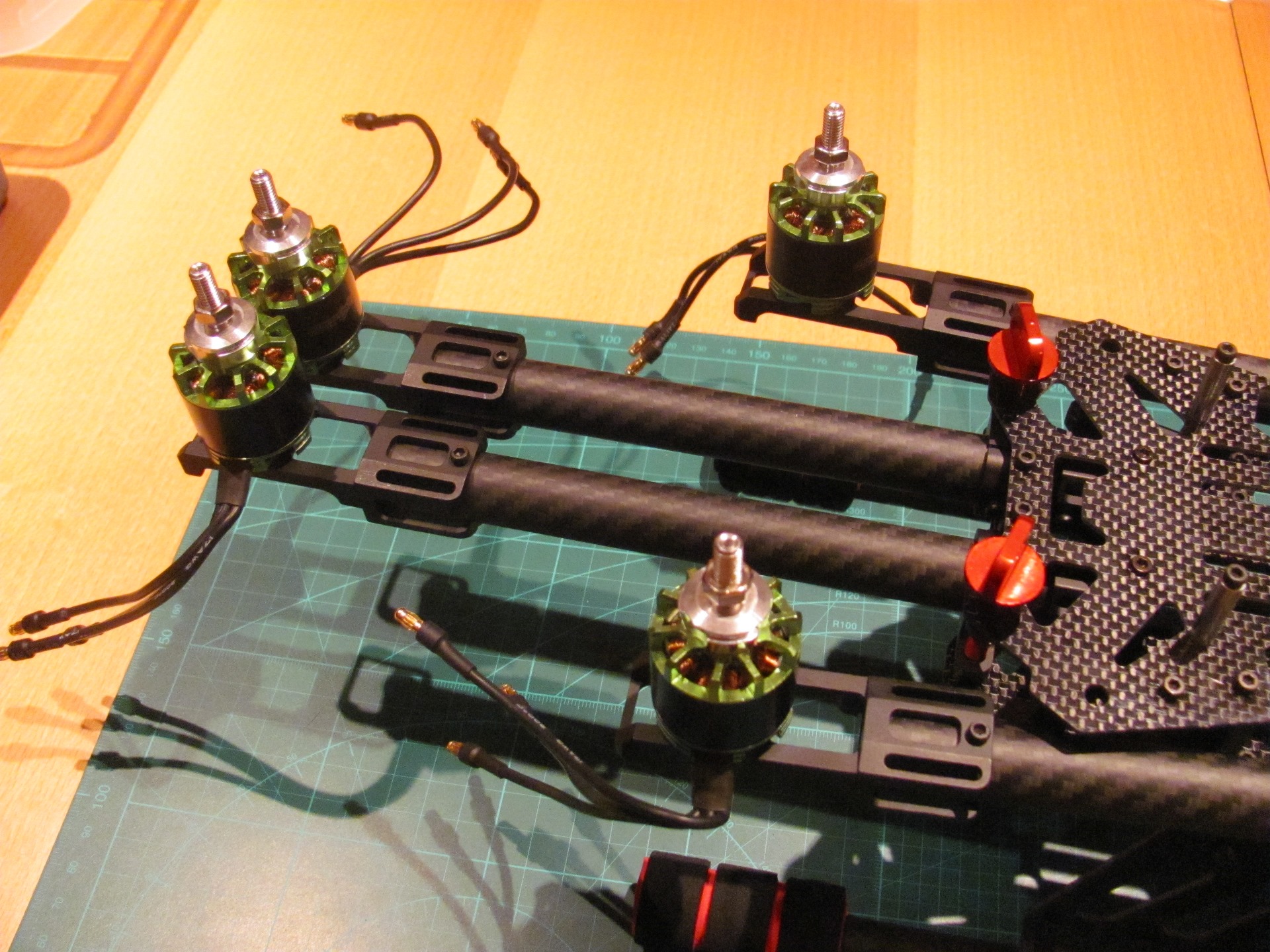
Danach habe ich meine Multistar-Motoren auf den Auslegern befestigt, so das die Kabel der Motoren sich nicht im Wege stehen, wenn der Copter zusammengeklappt ist.

Da ich am Anfang dachte, ich brauche keinen Gimbal für die Montage der Action Cam stand ich vor einem Problem: wie und wo befestige ich die Action Cam? Da habe ich mir gedacht, ich nehme die 2 unteren Befestigungsausleger weg und baue sie so zusammen, das ich die Schraube zum Befestigen der Action Cam Halterung hindurch bringe und diese so fixieren kann.
Danach habe ich die 2 Kunststoffbügel, welche an den zwei Rohren angeknipst sind, weg und befestige diese an den Auslegern. Damit ich allerdings die Schraube für die Action Cam Halterung durchbekomme und das diese nicht verrutschen kann, habe ich 2 zusätzliche Löcher gebohrt, um den hinteren Kunststoffbügel zu befestigen.
Und siehe da, es hält super…





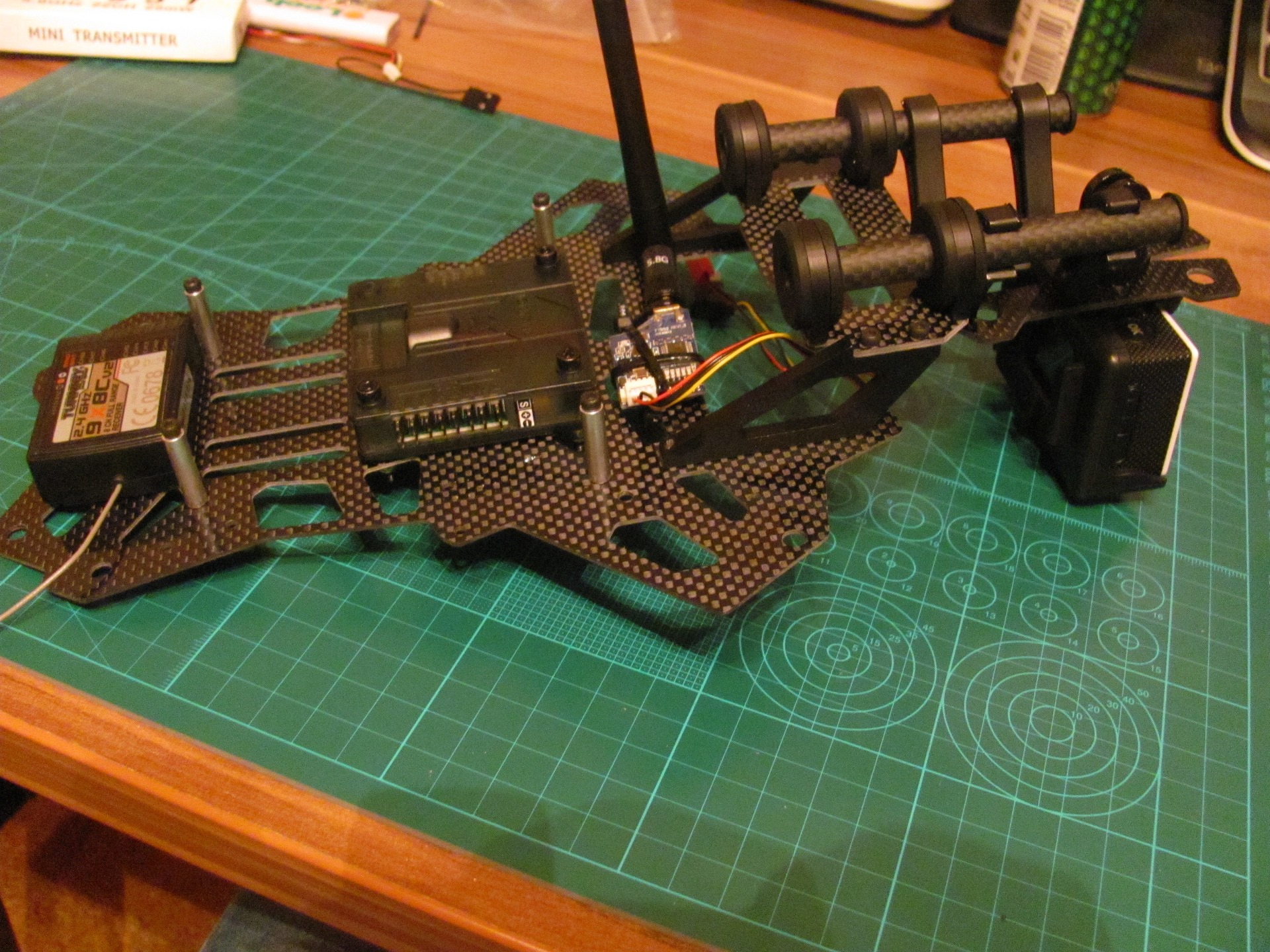
Nachdem das Problem mit der Halterung gelöst und diese befestigt war, bin ich hergegangen und habe geschaut, wo ich welches Teil auf der oberen Rahmenplatte befestige. Dazu habe ich die einzelnen Teile wie Flight Controller, FPV Sender und den Empfänger für den Controller in verschiedenen Variationen auf die Platte gelegt. Nach öfteren verschieben habe ich die Plätze für die Teile gefunden und diese dort befestigt.
Hier habe ich geschaut, das ich die benötigten Kabel gut in den unteren Bereich führen kann, damit diese nicht oben herumfliegen.Den Flight Controller habe ich mit den mitgelieferten Schrauben befestigt, allerdings mußte ich dazu noch 2 separate Löcher bohren. Der FPV Sender ist im Moment noch mit Kabelbindern befestigt, wird aber dann so wie der Empfänger der Funke mit Klettband befestigt.



Da dies nun auch erledigt war, dachte ich mir, ich baue schnell die Halterung für den Monitor zusammen. Mit dieser Halterung kann der Monitor, in welchem auch der FPV Empfänger eingebaut ist, an der Funke befestigt werden. Den Monitor kann man danach auch Richtung Funkt zuklappen. Da der Monitor nur mit einer Schraube in der Mitte befestigt wird, war das Problem vorhanden, das der Monitor sich immer wieder nach links oder rechts verdrehte. Damit das nicht passiert, gerade wenn man Mitten in der Fliegerei ist, habe ich von 2 Kugelschreibern die Druckknöpfe genommen und diese mit Sekundenkleber an der Halterung direkt vor dem Monitor festgeklebt.


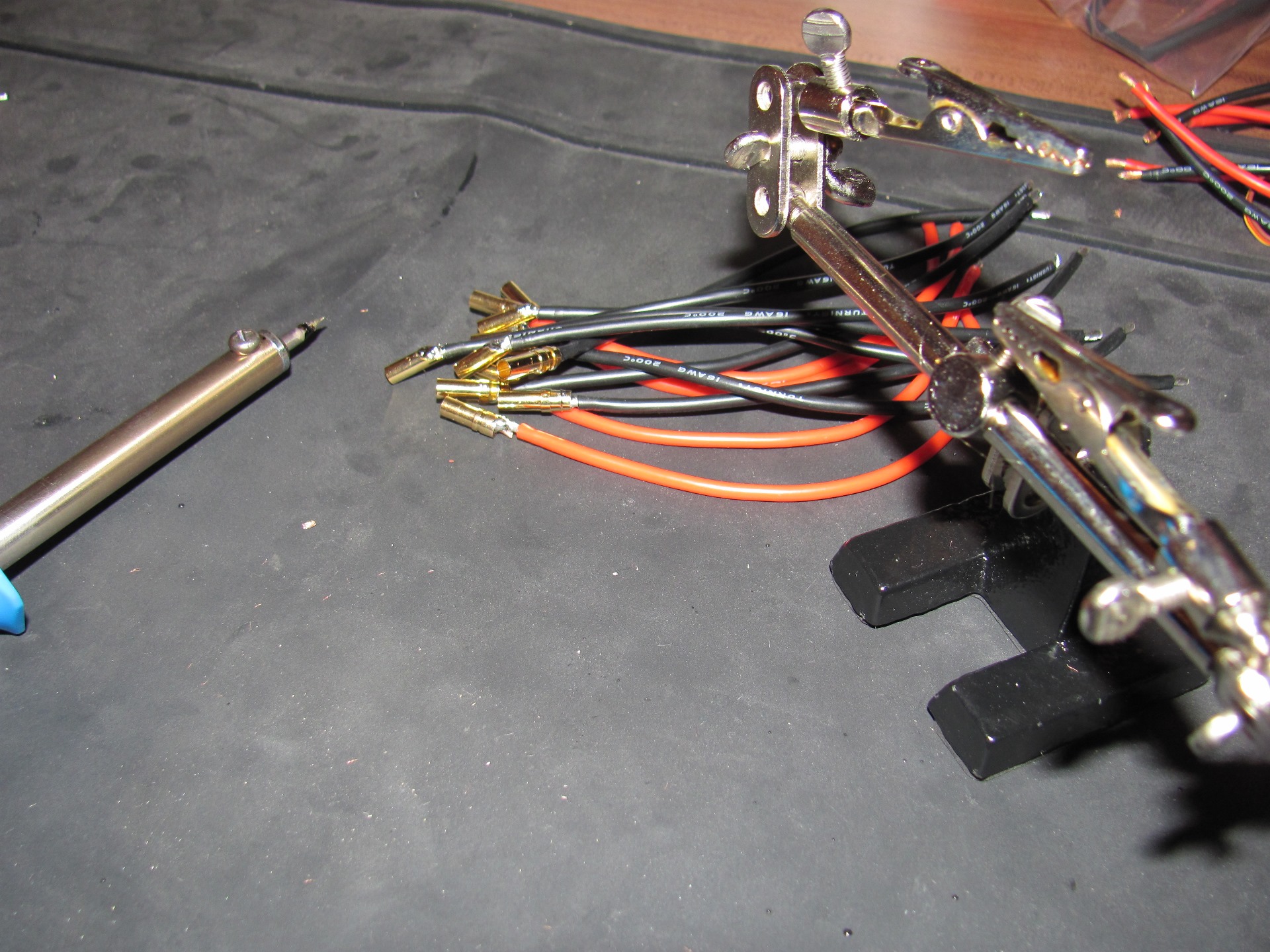
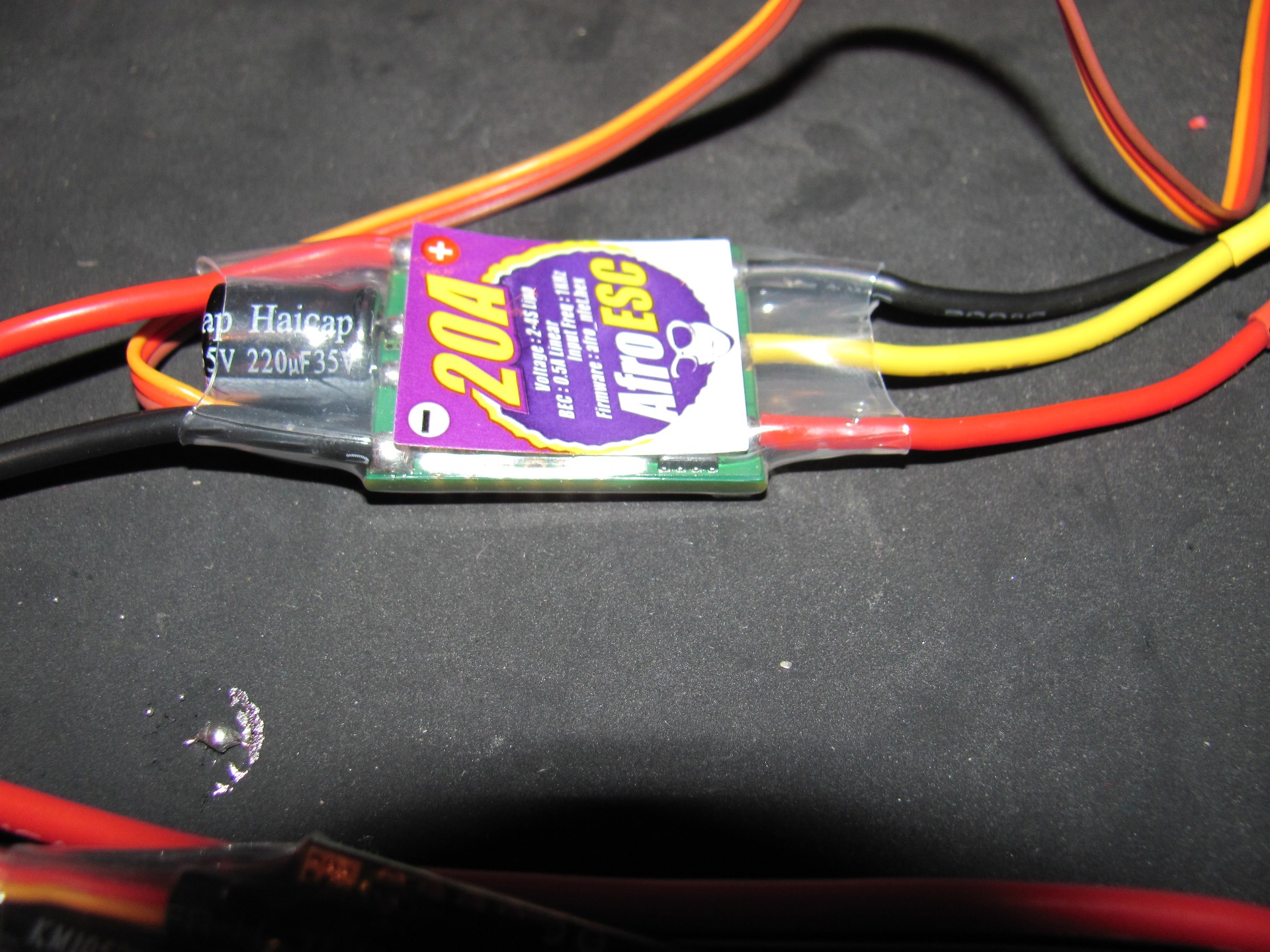
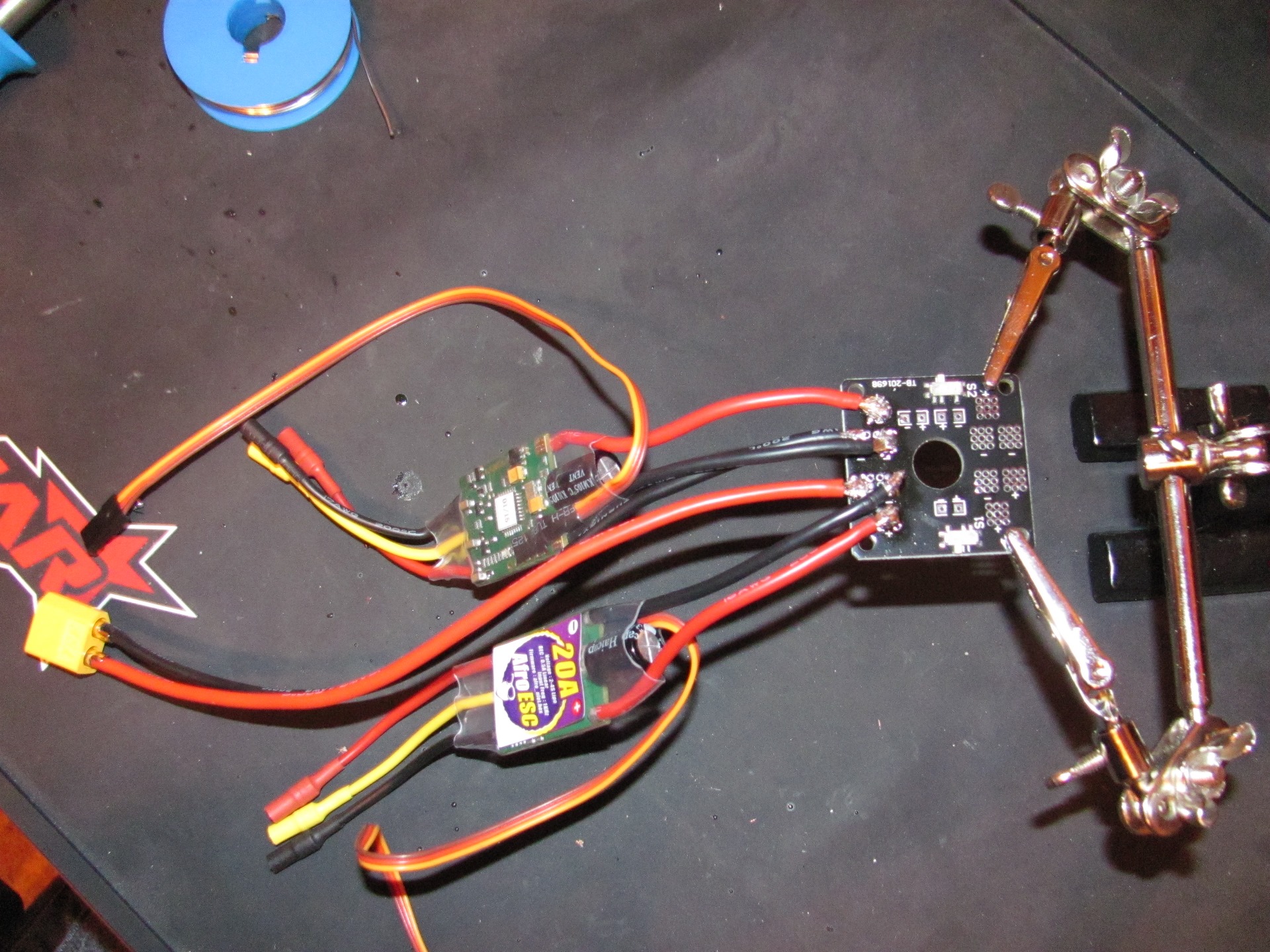
Nach einer kurzen Pause habe ich mich daran gemacht, Kabel abzulängen und und die 3,5mm Stecker und Hülsen an die Kabel zu löten. Im mache das System bewusst mit Stecker, damit ich im Notfall Motoren und ESC´s ohne weiteres auch im Feld wechsel kann, falls was defekt sein sollte. Die Ausleger des XJ470 haben zwar unter der Motorbefestigung die Möglichkeit, ESC´s aufzunehmen und mittels Halterahmen zu fixieren, allerdings sind meine Afro ESC´s zu groß dafür.
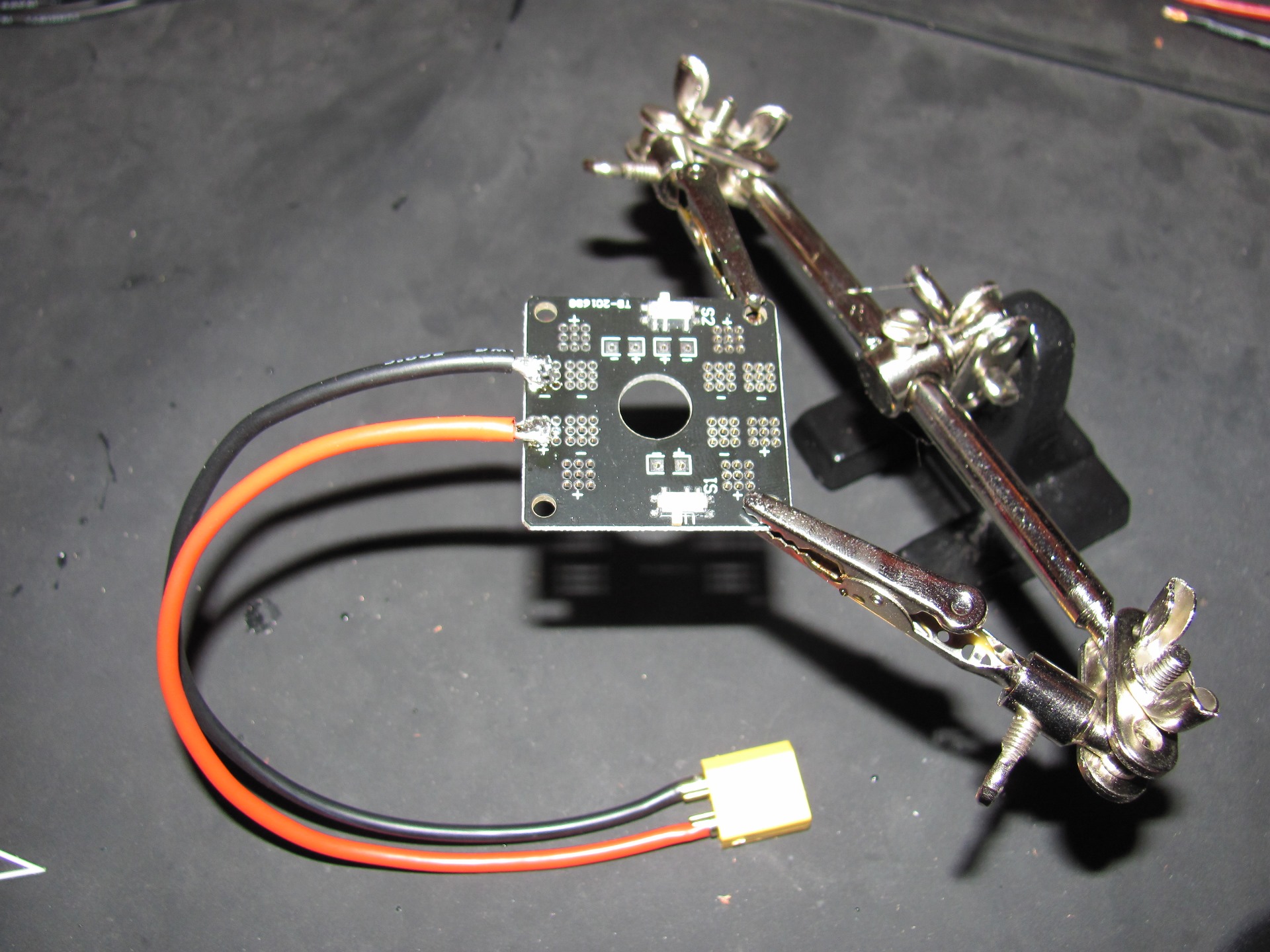
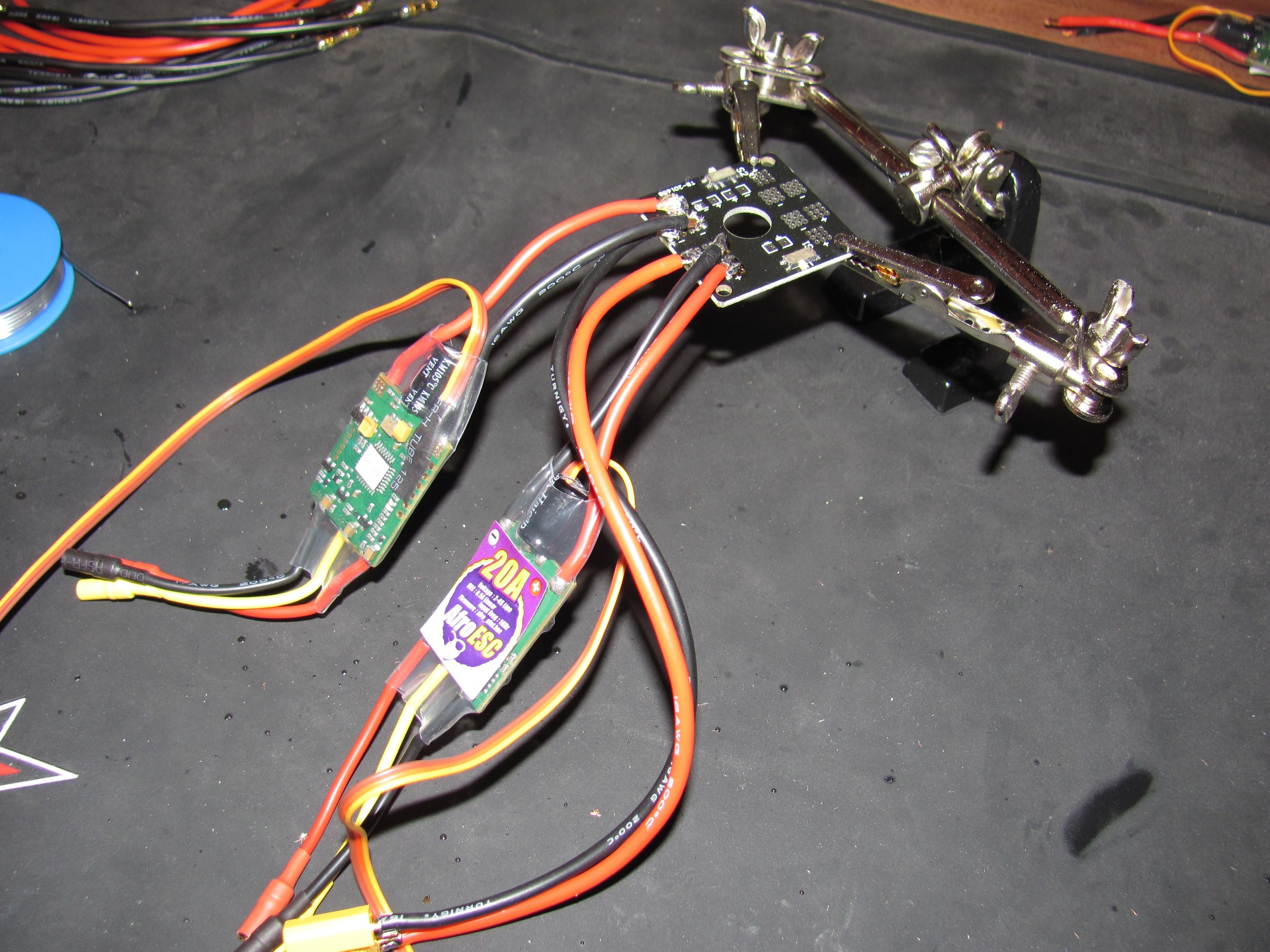
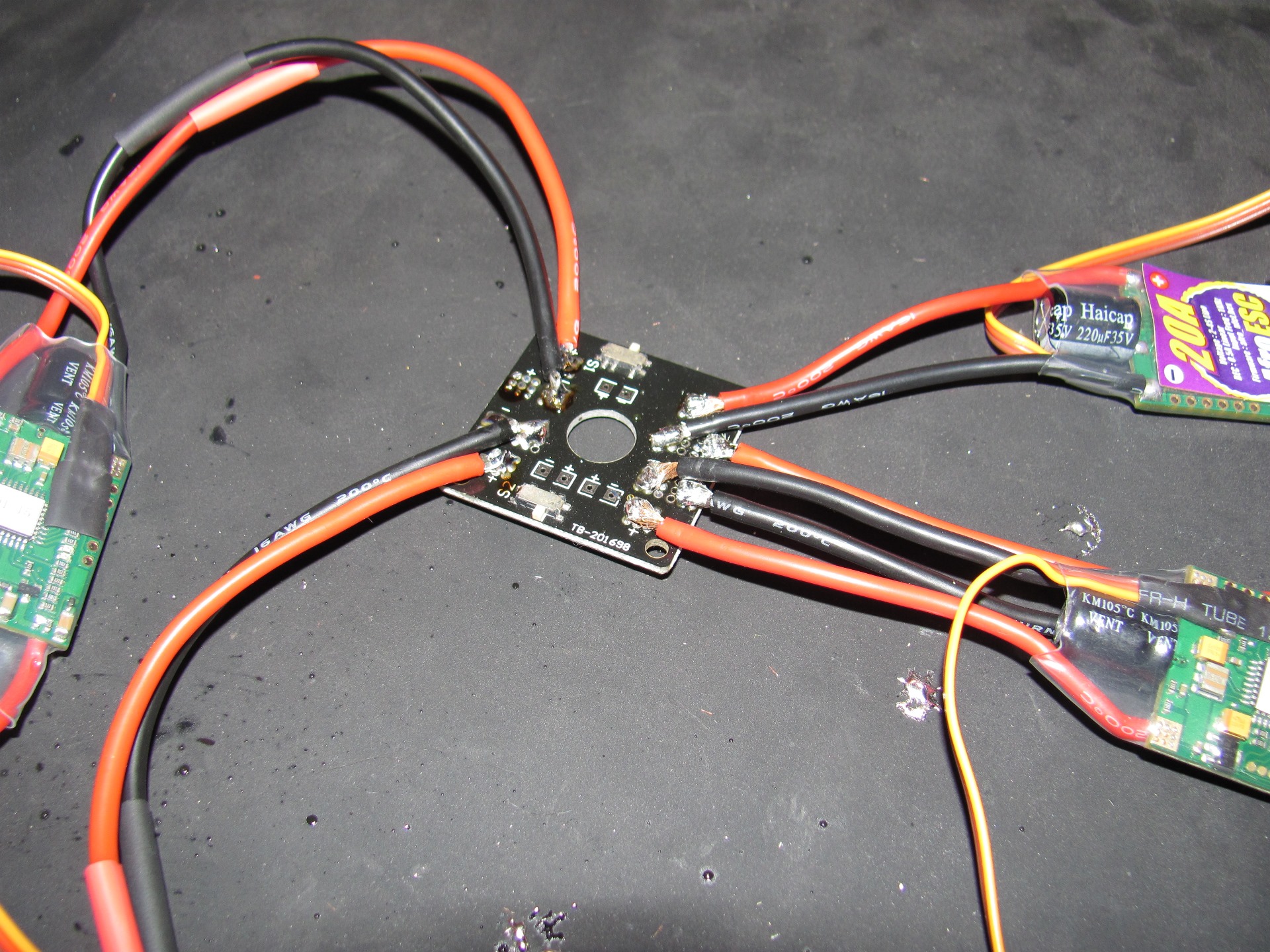
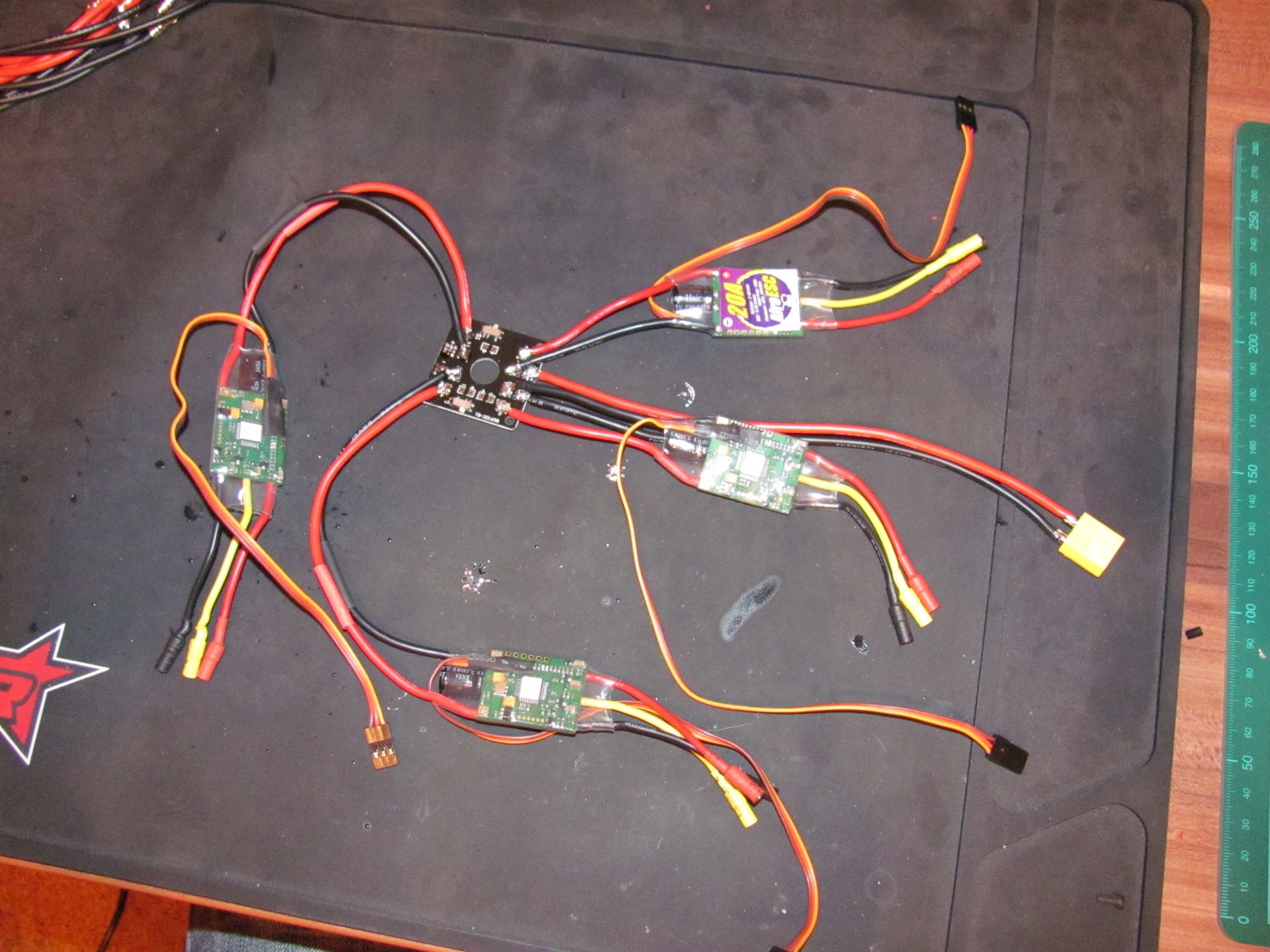
Daher führe ich die Kabel von den Motoren durch die Ausleger ins Innere und platziere dort meine ESC´s. Um die ESC´s mit Strom zu versorgen, habe ich mir eine kleine Verteilerplatte gekauft, wo die Stromversorgung durch den Akku an die ESC´s erfolgt. Auch habe ich hier die Option noch LED´s zu befestigen und mit Schaltern ein- bzw. auszuschalten.